publications
+ denotes equal contribution and joint lead authorship.
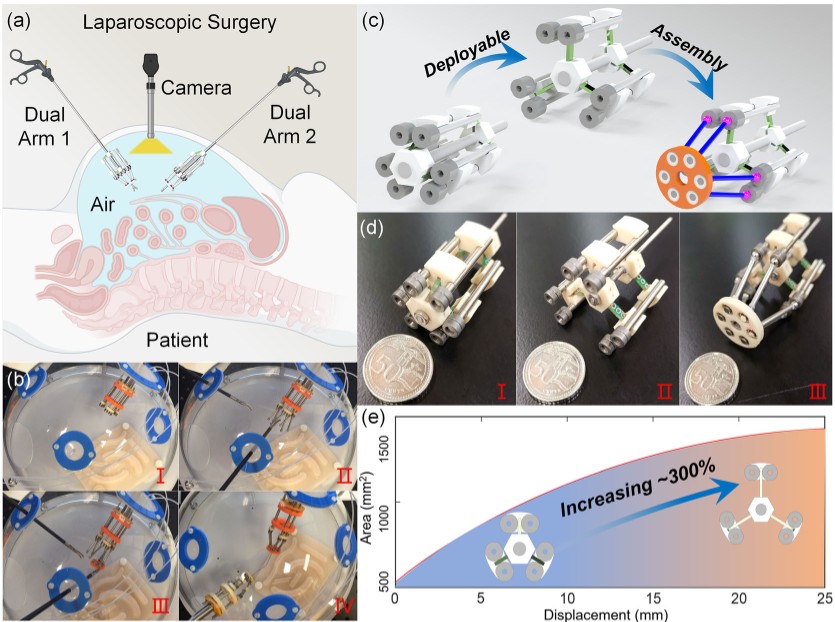
Centimeter-Scale Magneto-Reconfigurable Parallel Robots: A Grassmann Line Geometry Synthesis Framework for Multitask Adaptation Using Magneto-Connected Part Library.
In Advanced Intelligent Systems 2025.
The development of centimeter-scale reconfigurable parallel robots is critical for applications requiring precise, adaptive, and space-constrained operations across bench-top automation and minimally invasive systems. However, existing platforms struggle to balance miniaturization, multidegree-of-freedom flexibility, and rapid in situ reconfiguration for different tasks. To address these challenges, Grassmann Line-Guided Magneto-Operative Robotics is proposed, a systematic design framework that synergizes Grassmann line geometry with modular magnetic spherical joint connections to enable rapid in situ topology changes. A synthesis-based method is employed to guide the assembly strategy design flow for a specific magneto-connected parallel robot. The magneto-coupled modules enable in situ minute-level (average 48 s) reconfiguration across multiple types of centimeter-scale magneto-reconfigurable parallel robots, all sharing a common driving system and featuring a base diameter of 3.2 cm. As a case study, a widely used 3-P(4S) robot system is fully analyzed. The regular workspace, considering the influence of magnetic connections and the global transmission index, is evaluated to assess the performance of different design parameters. Then, the payload experiment is conducted. Bench-top positioning, bench-top manipulation, and laparoscopic manipulation potentials are demonstrated. Overall, the proposed library and design methodology, utilizing magneto-connected parts, enable the rapid prototyping of reconfigurable, modular parallel robots.
2025
Augmented Reality Navigation with Optical Coherence Tomography in Robotic Neurosurgery.
In International Conference on Biomimetic Intelligence and Robotics (ICBIR) 2025.
An important issue commonly faced in neurosurgical procedures is the lack of Augmented Reality (AR) navigation and perception with sub-millimeter accuracy. The most commonly used magnetic resonance imaging (MRI) scans provide planar imaging of brain structures and corresponding three-dimensional reconstruction results. However, the principles of MRI imaging limit the imaging speed of this modality, and the millimeter-scale resolution is not always satisfactory. Recently, an optical coherence tomography (OCT) imaging method has been applied in neurosurgical procedures due to its higher spatial resolution and imaging speed, and has achieved the goal of deep brain imaging using endoscopic lens designs. However, the limited depth of field and cross-sectional imaging plane of OCT imaging technology often confuse novice users and pose difficulties for real-time understanding during surgical procedures. For this purpose, we explored a method for visualizing OCT images in augmented reality (AR) wearable devices. We collect real-time OCT data through the Robot Operating System (ROS) and perform rendering processing. Then, we develop the AR system interface in Unity software and perform real-time visualization of OCT images. Real-time updating and display of OCT images enable users to observe changes in brain structures during surgical procedures, identify tissue structural content in OCT images, and perform more precise surgical operations.
2025
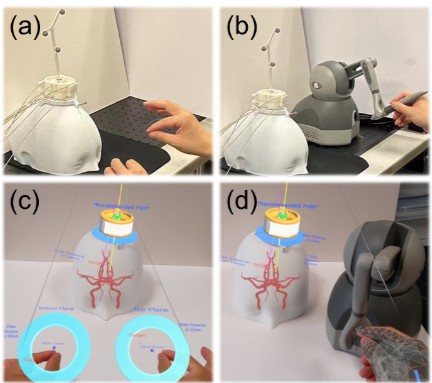
Head-mounted Robotic Needle Positioning: Learning from Augmented Reality Demonstration of Neuronavigation and Planning.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025.
Robotic needle positioning tasks in neurosurgery often face challenges due to insufficient perception of planar guidance images during surgery. In this work, we propose an Augmented Reality (AR) interface to help perform the robotic needle positioning tasks by learning from demonstration (LfD). Enhanced immersion in the workflow is achieved by displaying surgical scenes and calculated navigation information. The framework utilizes mixed interactive interfaces in virtual and real environments, enhancing demonstration efficiency and quality. A head-mounted display and an optical tracking system are utilized to perform the visualization and needle tracking. Gaussian Mixture Model (GMM) and Gaussian Mixture Regression (GMR) are employed to learn a robust and smooth trajectory policy from demonstrations. Experiments on robot reproduction of the needle positioning task achieved a final positioning error of 0.6 mm and an average trajectory error of 1.07 mm. Comparative user studies with haptic device-based teleoperation exhibit a low completion time of 62.76 s and reduced workload of the proposed system.
2025
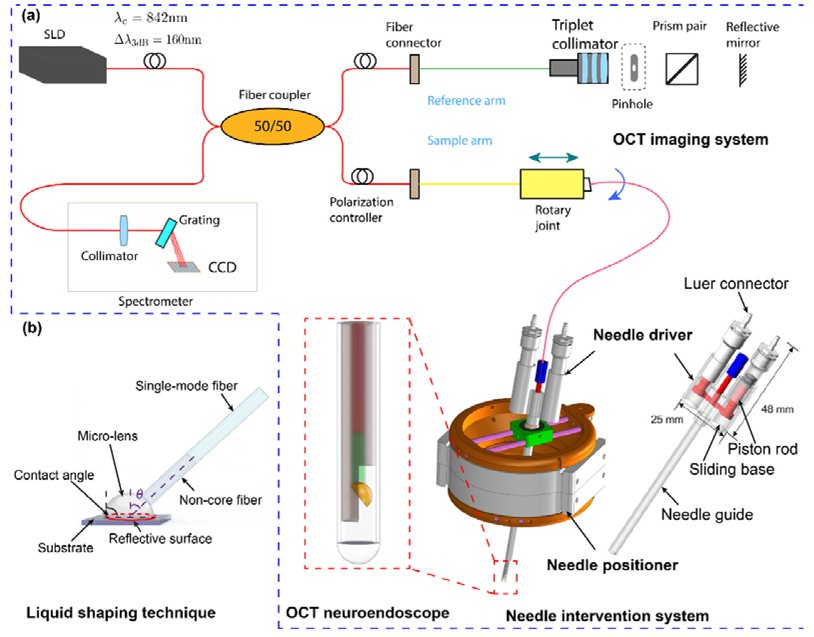
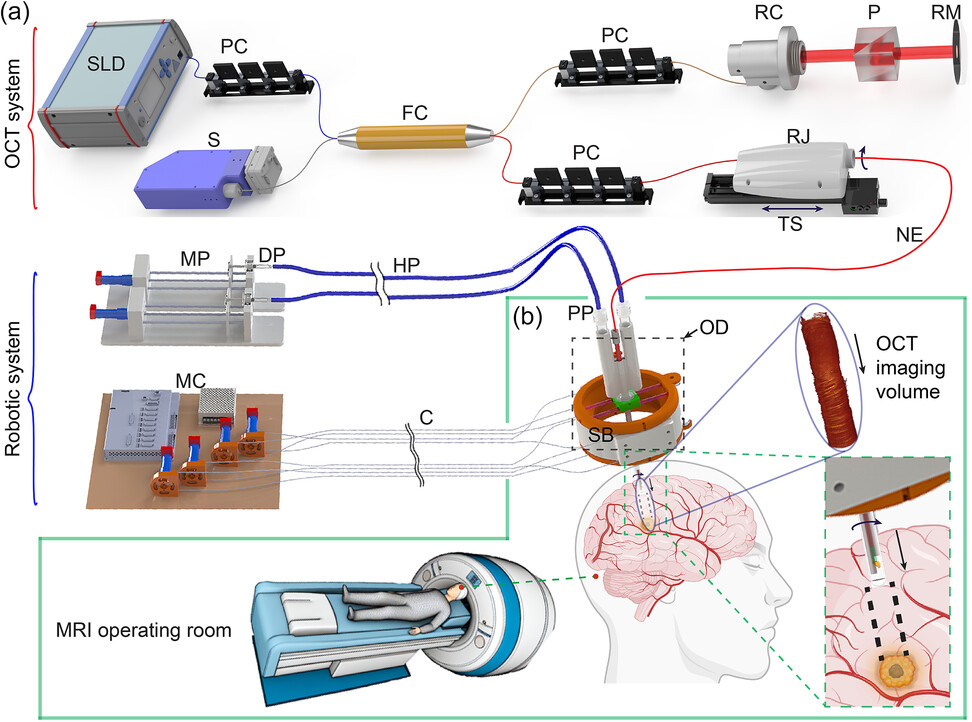
Patient-Mounted Neuro Optical Coherence Tomography for Targeted Minimally Invasive Micro-Resolution Volumetric Imaging in Brain In Vivo.
In Advanced Intelligent Systems 2024.
Targeted neuroimaging plays a vital role in evaluating pathologies and guiding interventions in deep brain regions, such as biopsy, laser ablation, and deep brain stimulation. However, current neuroimaging techniques face several challenges when it comes to imaging the deep brain. These challenges include limited imaging depth, a narrow field of view, low resolution, and a lack of real-time imaging and stereotactic deployment capabilities. To address these challenges, a patient-mounted neuro optical coherence tomography (neuroOCT) system that combines a lightweight 5 degrees-of-freedom skull-mounted robot (Skullbot) with a neuroendoscope measuring ≈0.6 mm in diameter is introduced. This innovative system enables targeted and minimally invasive neuroimaging with an axial resolution of ≈2.4 μm and a transverse resolution of around 4.5 μm. The Skullbot can be securely attached to the head and precisely deploys the neuroendoscope with an accuracy of ±1.5 mm in the transverse direction and ±0.25 mm in the longitudinal direction. This allows for motion-insensitive stereotactic imaging within the brain. By utilizing the neuroOCT system, targeted imaging of a tumor in a brain phantom is successfully demonstrated. Furthermore, the system's capability for in vivo micro-resolution volumetric neuroimaging of fine structures within a mouse brain is validated.
2024
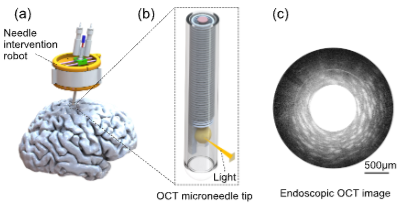
Head-Mounted Hydraulic Needle Driver for Targeted Interventions in Neurosurgery.
In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024.
Needle interventions are crucial in neurosurgery, requiring high precision and stability. This paper presents a 5-DoF head-mounted hydraulic needle robot designed for accurate and targeted needle insertion and neuroimaging in the deep brain. The robot is compact and lightweight by utilizing a hydraulic pipe transmission to connect the needle driver and actuator. The syringe pistons serve as the actuator and executor, enabling synchronized motion, minimal hysteresis, and high-accuracy insertion. The hydraulic transmission system exhibits hysteresis of less than 0.8 mm, with bidirectional insertion accuracy of approximately 0.05 mm. The resulting needle driver features a compact structure measuring 48 mm × 25 mm × 9 mm, accompanied by a 70-mm-long needle guide. The needle driver is mainly 3D printed, while the hydraulic transmission ensures full compatibility with magnetic resonance imaging (MRI) by isolating all electromagnetic parts from the executor. This compact and lightweight robot-assisted needle intervention system significantly enhances the safety, accuracy, and effectiveness of deep-brain neuroimaging. The feasibility of precise positioning and insertion is further demonstrated by deploying an optical coherence tomography (OCT) microneedle in a rat brain.
2024
Submillimeter robotic OCT neuroendoscope for deep-brain imaging in vivo.
In Advanced Biomedical and Clinical Diagnostic and Surgical Guidance Systems XXII 2024.
To effectively manage inoperable deep-seated brain diseases, a high-resolution diminutive endoscope is required. This endoscope should be capable of precisely localizing and evaluating lesions in vivo. In this study, we introduce an ultrathin robotic OCT neuroendoscope designed for minimally invasive and targeted imaging in the deep brain. The neuroendoscope, measuring only 0.6mm in diameter, is fabricated by coupling a custom micro-lens on the fiber tip. This fabrication technique enables high resolution imaging of 2.4μm x 4.5μm in the axial and transverse directions. To ensure precise trajectory planning and accurate lesion localization within the brain, we have developed a skull-mounted robotic neuroendoscope positioner, allowing for a localization accuracy of approximately 1mm. To demonstrate the capabilities of our technology, we have utilized electromagnetic tracking technology to enable us to control and navigate the neuroendoscope, allowing for the precise localization and imaging of targets within a brain phantom. The new technology holds significant potential to translate OCT neuroendoscopy into clinical practice for deep brain conditions.